A last minute wheel discovery!
Last-minute change on the drive board. I discovered that Hero IO ports 122 and 125 are Steering limit counter-clockwise and clockwise, respectively. The problem is, I may not have enough ports on my Arduino to turn these into inputs. I have the following ports left available on my Arduino Uno that I’m testing this with. – 0, 1, 2, and A3.
0 and 1 are reserved for serial RX and TX – this is an option but means I have to take precautions when uploading new code – namely, I would need to ensure everything is disconnected from these ports. Additionally, it eliminates the ability to debug the chip in the future using Serial output. While I think I can work with these restrictions – neither are ideal.
2 Doesn’t actually exist on the Trinket Pro
A3 – this port is a very good option – too bad I don’t have 2 of them 🙁
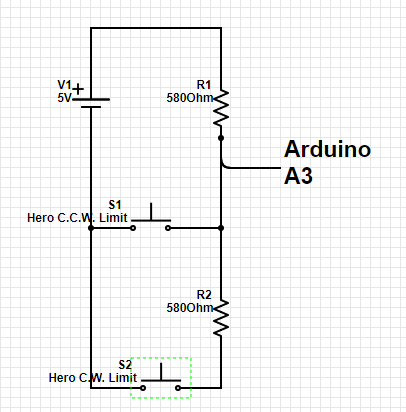
My first thought is that perhaps, as A3 is an analog input, I can somehow use it for both C.C.W. and C.W. by using 3 flag voltages.
Maybe something like:
- 5V neither switch activated.
- 2.5V C.W switch activated
- 0V C.C.W. switch activated
When S1 and S2 are open, R1 acts as a pull-up transistor to A3, bringing A3 to ~5V. When S1 is closed, the path of least resistance for A3 is to ground, and A3 goes to ~0. When S2 is closed, R1 and R2 act as a voltage divider, and the voltage goes to ~2.5V.
Testing of the circuit proved it worked as desired: